18:24 Разработка робота пылесоса | ||
Современные домохозяйства становятся все более автоматизированными, что обеспечивает удобство и сокращает время, затрачиваемое на домашние дела. Хотя пылесосы облегчают уборку дома, они в основном шумные и громоздкие для повседневного использования. Поэтому необходимо усовершенствовать технологию вакуумной очистки, чтобы уменьшить эти недостатки.
Здесь мы сообщаем о разработке компактного и эффективного робота пылесоса https://hoverboard.com.ua/smart_home/pilesos/ для потенциального использования в офисе и дома. Разработанный робот имеет форму диска, оснащен пылесосом и технологией очистки и управляется мегакроконтроллером Arduino. Он всасывает грязь через выдвижной мусорный ящик, на котором установлен охлаждающий вентилятор, и две подметальные машины, каждый из которых приводится в движение двигателем 3 В постоянного тока.
Робот движется через два задних колеса, управляемых моторным щитом, и переднее рицинусное колесо, которое также управляет его поворотом. Четыре ультразвуковых датчика, расположенных под углом 90 °, обнаруживают препятствия и впоследствии помогают роботу ориентироваться. Робот питается от 3-х батарей (28,8 В пост. Тока), перезаряжаемых через встроенный адаптер AC-DC.
Он имеет ширину 12 см и высоту 9 см, что облегчает маневрирование в окружающей среде. Благодаря легкому весу батареи, картонному мусорному мешку и небольшому воздуходувке, его вес составляет около 1,5 кг. Общий потребляемый ток составляет 101102 мА. При полной зарядке аккумулятор емкостью 2200 мАч работает непрерывно в течение двух часов и эффективно очищает пол. Благодаря этой возможности устройство будет развернуто для использования в офисе и дома, что сделает уборку полностью автономной.
1. Введение
Современные пылесосы, хотя и эффективны, довольно громоздки и, следовательно, требуют большой рабочей силы для правильного функционирования. Более ранние известные уборщики - уборщики из Дэниэла Хесса из Айовы (в 1860 г.) и Айвса В. Макгаффи из Чикаго (в 1868 г.). В то время как первый использовал сильфон для создания всасывания и сбора пыли с помощью вращающейся щетки, последний работал с ремнем, приводимым в действие ручным коленчатым вентилятором, что затрудняло его работу. В конце 1990-х и начале 2000-х годов были разработаны более эффективные подметальные машины с ограниченной мощностью всасывания. Некоторые известные бренды - это iRoomba, Neato и bObsweep.
В зависимости от поставленной цели, роботизированные пылесосы подходят для офисов, гостиниц, больниц и домов. Однако большинству дешевых уборщиков необходим более эффективный алгоритм очистки для эффективного функционирования, в то время как умные являются довольно дорогими и, следовательно, недоступны большинству домов. Эти проблемы были тщательно рассмотрены при разработке робота пылесоса, описанного в этой статье.
Нынешний робот-пылесос был изготовлен из компьютерных отходов, ультразвуковых датчиков и микроконтроллера Arduino mega2560, что делает его относительно дешевым. Он перемещается по комнатам, используя шаблонный алгоритм, и его механизм очистки усилен двумя вращающимися щетками, расположенными рядом. Его форма диска была тщательно учтена при проектировании подметальных машин, а его эффективность была оценена.
2. Рассмотрение и проектирование компонентов робота
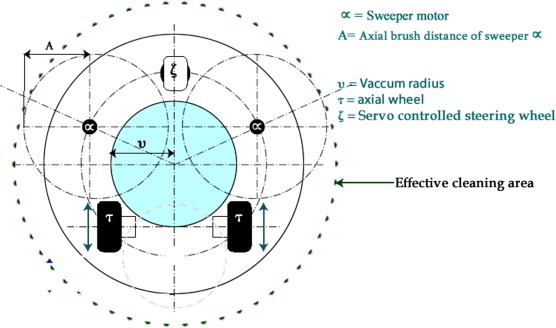
2.1. Колесная система
Два осевых колеса с приводом от двигателя постоянного тока обеспечивают движение только в параллельных направлениях и создают крутящий момент, необходимый для перемещения очистителя. Единственное переднее колесо, управляемое сервоприводом, управляет роботом, активно и быстро переключая направление вращения колеса. Он был разработан для облегчения движения робота назад и вперед.
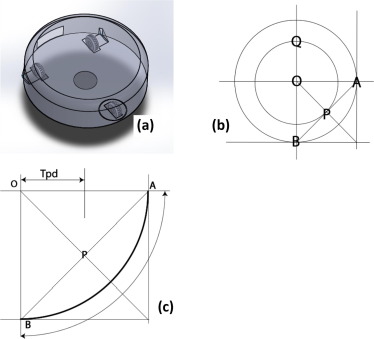
Колесная система была тщательно и систематически продумана, чтобы обеспечить низкий центр тяжести и точное движение очистителя. Колеса были аккуратно размещены в соответствии с формой робота (рис. 2б). Для трехколесного робота использовался метод триангуляции для позиционирования колес (рис. 2в). Для робота диаметром D сектор OAB задается как:
Tdp - расстояние от оси положения шины до центра робота, а ось P (положение колеса) - это Tpd в горизонтальном и вертикальном направлениях от центра робота. Эта процедура была использована для определения положения второго колеса. Однако положение переднего колеса было определено путем рисования общего круга через точку P с использованием O в качестве центра, затем линия BO была расширена, чтобы встретить круг в точке Q, которая стала осью переднего колеса (Рис. 2a ).
2.2. Система очистки
2,3. Электрическая система и аккумулятор
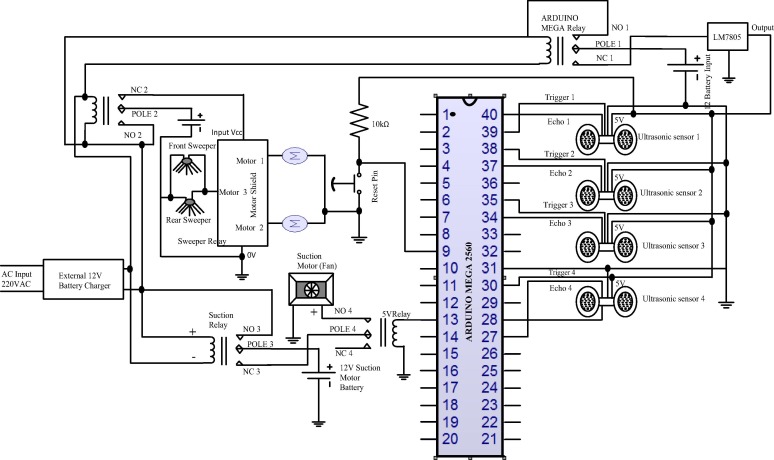
Полная схема электрического подключения показана на рис. 3. Реле, ультразвуковые датчики, всасывающий двигатель, подметальные машины, среди прочего, подключены к мега-контроллеру Arduino через соответствующие контакты. ИС стабилизатора напряжения LM7805 обеспечивает регулируемый источник питания 5 В с диапазоном входного напряжения 7–35 В и номинальным током 1 А. Реле 1, Реле 2 и Реле 3 служат переключателем между внешним источником энергии и Arduino, всасывающим двигателем и аккумуляторной батареей двигателя. , Когда полюс 1, полюс 2 и полюс 3 вступают в контакт с NO 1, NO 2 и NO 3 соответственно, это указывает на то, что используется внешний источник питания, и все батареи заряжаются. Однако когда полюс 1, полюс 2 и полюс 3 вступают в контакт с NC 1, NC 2 и NC 3, соответственно, это означает, что батареи используются.
2,4. Система управления: датчики и микроконтроллер
Микроконтроллеры, как правило, содержат ядра процессора, память и программируемые периферийные устройства ввода / вывода. Они используются в автоматически контролируемых продуктах и устройствах, таких как системы управления автомобильными двигателями, пульты дистанционного управления, офисные машины, устройства и другие встроенные системы.
В этой работе мы использовали микроконтроллер Arduino, поскольку он использует одноплатный компьютер, что делает его популярным на профессиональном рынке. Arduino с открытым исходным кодом с относительно дешевым оборудованием. В то время как микроконтроллер Arduino имеет различные функции в зависимости от сложности использования, для этой работы используется мега-Arduino, поскольку он позволяет нам использовать больше выводов и больше памяти для сохранения кодов. Arduino Mega - это микроконтроллерная плата на базе ATmega2560. Он имеет 54 цифровых входа / выхода (из которых 14 могут использоваться в качестве ШИМ-выходов), 16 аналоговых входов, 4 UART (аппаратные последовательные порты), 16 МГц кварцевый генератор, USB-соединение, разъем питания, разъем ICSP и кнопка сброса.
Микроконтроллер можно запитать, просто подключив его к компьютеру с помощью USB-кабеля, адаптера переменного тока в постоянный или батареи. Микроконтроллер Arduino имеет IDE, в которой хранятся написанные программные коды (см. Наш код в Приложении). Это позволяет взаимодействовать с другим программным обеспечением или аппаратным устройством. Микроконтроллер подключается к компьютеру через драйверы, которые часто устанавливаются автоматически.
2.5. Робот навигации
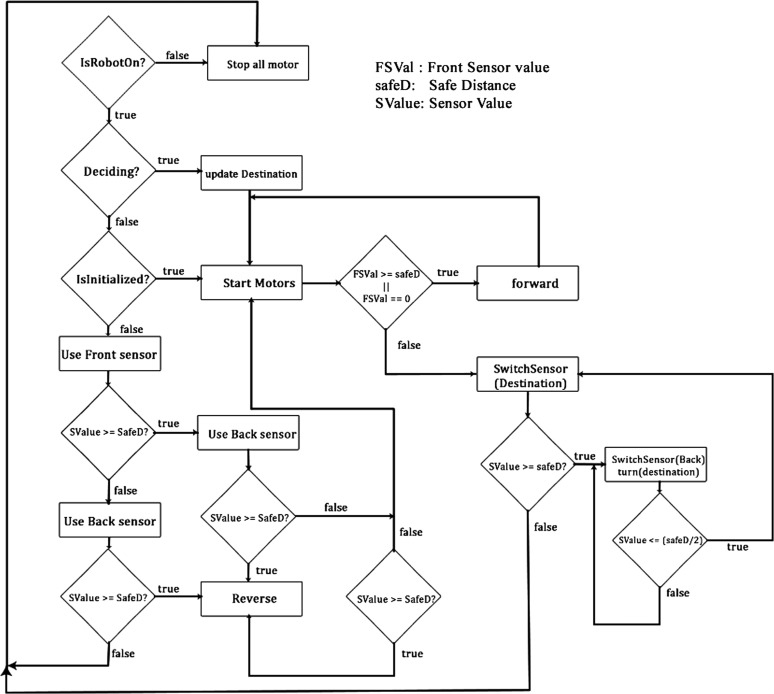
На рис. 4 приведена схема навигации разработанного робота. Как только робот включен, он проверяет свое окружение и решает, в каком направлении лучше двигаться. Это делается путем проверки расстояния между левым или правым датчиком до ближайшего препятствия, и стороне с большим расстоянием назначается пункт назначения. После этого робот проверяет, не находится ли он где-нибудь рядом с углом комнаты. С помощью заднего датчика оценивается расстояние до препятствия / угла. Затем робот движется назад, пока расстояние не станет меньше безопасного расстояния, safeD, которое выбрано равным 15 см. Водитель мотора на моторном щитке Arduino имеет возможность задействовать моторный тормоз. Тормоз работает, закорачивая обе клеммы двигателя вместе, и он управляется контактом 16 (канал A) и контактом 15 (канал B) (рис. 3).
После того, как эти предоперационные процедуры завершены, включаются двигатели подметальной машины, вентилятора и колес. Затем робот движется по прямой линии, пока не обнаружит препятствие, обозначенное безопасным расстоянием. После этого робот переключает свой датчик на сторону навигации, которая продолжает меняться после каждого поворота, поскольку сторона, обращенная к месту назначения, попеременно смещается слева направо или наоборот.
Когда расстояние в пункте назначения в конечном итоге приближается к безопасному расстоянию, это указывает на то, что робот достиг другого угла комнаты или застрял. В любом случае все двигатели отключаются для экономии энергии. Тем не менее, он повторно инициализируется каждые 15 секунд, чтобы увидеть, было ли устранено препятствие или изменилась среда.
3.1. Обзор полного робота
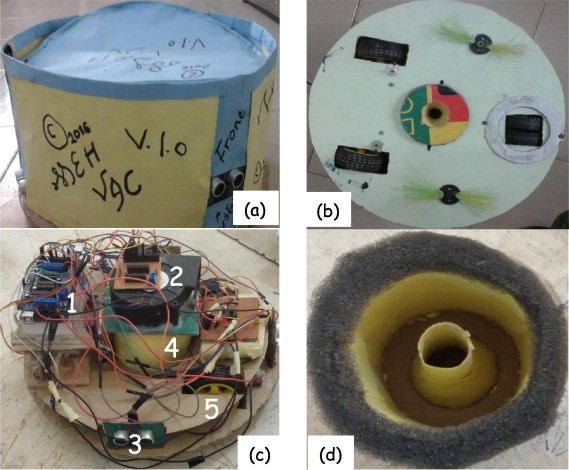
Также подметально-уборочные машины были аналитически размещены в наиболее оптимальном положении, что увеличивает площадь уборки робота без увеличения его общего размера (рис. 5б). Мусорная корзина разработана для одновременного использования в качестве хранилища грязи и циклонного устройства при полной интеграции с охлаждающим вентилятором (рис. 5б и г). Это указывает на то, что мусорный ящик на самом деле является контейнером, внутри которого установлен частичный вакуум, который всасывает и удерживает грязь без возможности проливания грязи. Следует подчеркнуть, что мусорный ящик находится в постоянном контакте с полом, из которого всасывается грязь.
Рис. 5. (a) Разработанный прототип робота пылесоса (b) Вид снизу, показывающий колеса, подметальные машины и мусорный ящик (c) внутренние компоненты пылесборника (d). Примечание: 1-микроконтроллер Arduino, 2-всасывающий вентилятор, 3-ультразвуковой датчик, 4-х мусорная корзина, 5-рамная рама.
При рассмотрении электрической конструкции каждая из пары литий-ионных полимерных батарей использовала для Arduino и моторного щитка независимо друг от друга, поскольку их энергопотребление различается. В то время как экран двигателя управляет всеми двигателями на борту робота, плата Arduino служит мозгом, который получает импульс от ультразвуковых датчиков и управляет экраном двигателя. Кроме того, дополнительная батарея 12 В питает всасывающий вентилятор, в результате чего общая батарея, приводящая робота в действие, составляет 28,8 В.
Рама шасси изготовлена из твердой картонной бумаги благодаря своей гибкости и доступности. Плата микроконтроллера Arduino установлена на шасси и размещена в переднем колесе, чтобы обеспечить легкий доступ другим взаимодействующим компонентам (Рис. 3, Рис. 5c). Четыре ультразвуковых датчика расположены на 90 ° друг от друга, в то время как воздуходувка создает вакуум, который всасывает грязь (Рис. 5c и d). Две подметальные машины вращаются по часовой стрелке и против часовой стрелки, чтобы собрать грязь в зону очистки. После того, как все компоненты собраны на раме и загружен программный код, робот был протестирован, и было обнаружено, что он эффективно всасывает грязь и эффективно устраняет препятствия.
Робот шириной 12 см и высотой 9 см облегчает маневрирование. Он весит всего 1,5 кг, что связано с легким аккумулятором, картонной корзиной для мусора и небольшим вентилятором. Другие физические размеры основных компонентов пылесоса приведены в таблице 1. Максимальный объем пылесборника составляет 0,14 л, что довольно мало по сравнению с другими современными пылесосами. Это ограничение наложено из-за малого диаметра вентилятора. При необходимости очиститель можно соответствующим образом увеличить. | ||
|
| ||

| Всего комментариев: 0 | |